CUDA 优化
SC07¶
Microsoft PowerPoint - SC07_Optimization_Harris.ppt [Read-Only] (polytechnique.fr)
常见优化方法¶
优化目标
- 对于计算密集应用:峰值性能 GFLOP/s
- 对于访存密集应用:峰值带宽 bandwidth
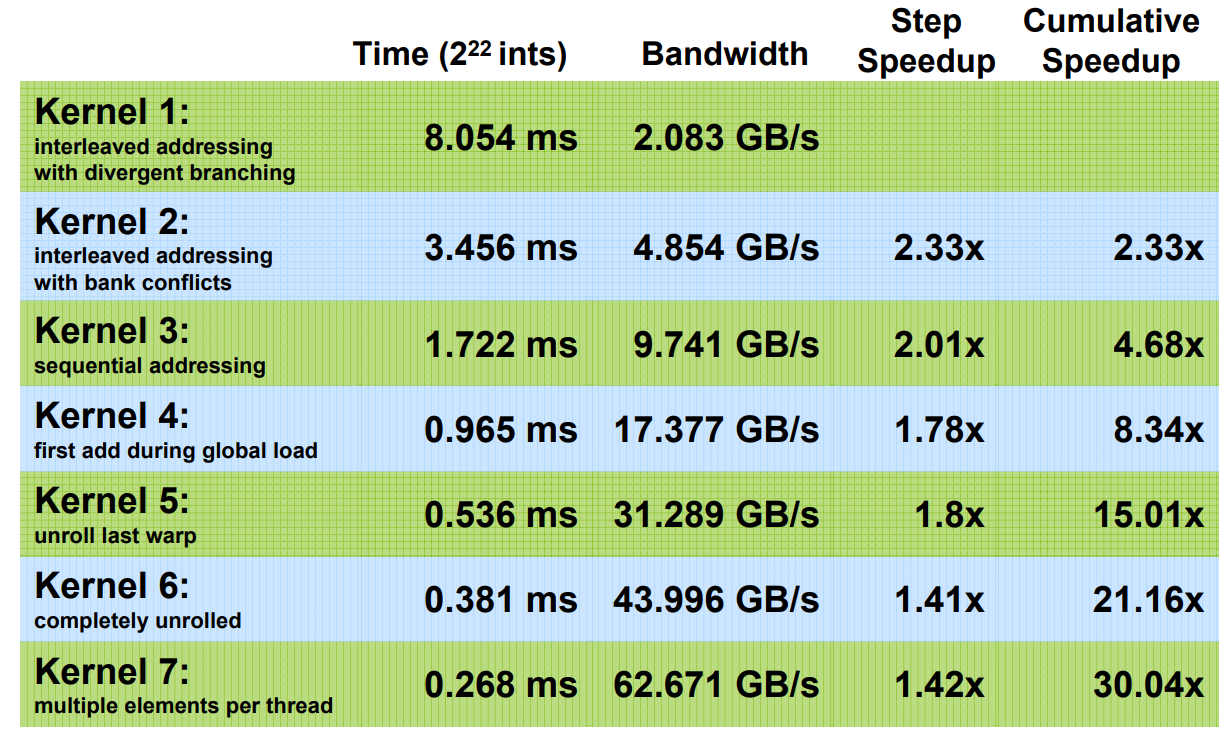
二叉规约¶
是 memory bound 应用:
- 计算强度很低(1 flop/operator)
- 1: interleaved_addressing v1: 每个线程读取一个元素到 SMEM,然后二叉规约(stride)
__global__ void reduce0(int *g_idata, int *g_odata){
extern __shared__ int sdata[];
int tid = threadIdx.x;
int i = blockIdx.x*blockDim.x + threadIdx.x;
// each thread loads one element from global to shared mem
sdata[tid] = g_idata[i];
__syncthreads();
//do reduction in SMEM
for(int s=1; s<blockDim.x; s*=2){
if(tid %(2*s)==0){
sdata[tid] += sdata[tid + s];
}
__syncthreads();
}
//write result for this block to GMEM
if(tid==0) g_odata[blockIdx.x] = sdata[0];
}
- 线程分支 diverge 太多
如图,假设一个 warp 包含两个线程。则图中 8 个线程需要 4 个 warp。而即使一个 warp 里只有一个线程,仍然需要占用一个 warp。因此上面的算法会导致 4+4+2+1=11 次 warp 调用。
v2 版本的代码则一个 warp 里的两个线程都是工作的,需要 4+2+1+1=8 次(盗图自:http://home.ustc.edu.cn/~shaojiemike/posts/nvidiaoptimize/)
- 2: interleaved_addressing v2:
for(int s=1; s<blockDim.x; s*=2){
int index = 2*s*tid;
if(index < blockDim.x){
sdata[index] += sdata[index+s];
}
__syncthreads();
}
- SMEM bank conflict
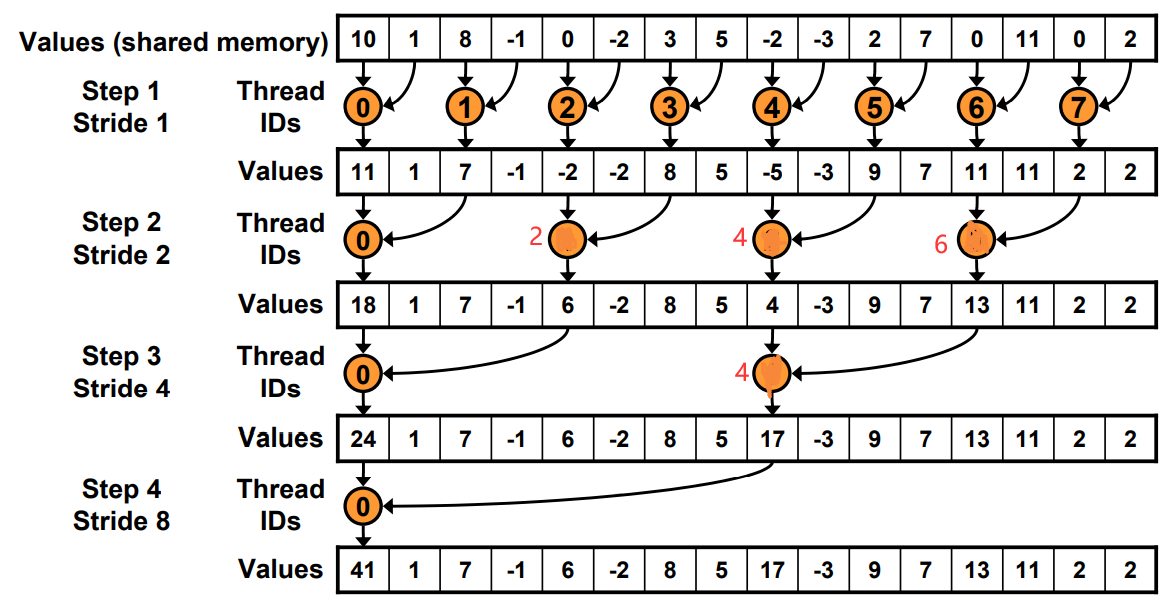
- 3: sequential addressing
- 第一次迭代就已经一半的线程是空闲的
- 4: first add during load:
- 仍然达不到带宽上限,因此可能是指令开销
- 辅助类指令 (ancillary):不是 load, store 和核心计算的算数指令
- 即地址计算和循环开销
- 仍然达不到带宽上限,因此可能是指令开销
<<<n/64/2, 64>>>kernel();
int i = blockIdx.x * (blockDim.x*2) + threadIdx.x;
sdata[tid] = g_idata[i] + g_idata[i + blockDim.x];
- 5:Unroll the last warp
- 活动线程数随着规约迭代次数增加而减少
- 当 s<=32 时,只有一个 warp。warp 内的指令时 SIMD 同步的。
- 因此不需要__syncthread(),不需要 if(tid < s)
for(int s=blockDim.x/2; s>32; s>>=1){
if(tid < s){
sdata[tid] += sdata[tid+s];
}
__syncthreads();
}
if(tid<32){
sdata[tid] = sdata[tid+32];
sdata[tid] = sdata[tid+16];
sdata[tid] = sdata[tid+8];
sdata[tid] = sdata[tid+4];
sdata[tid] = sdata[tid+2];
sdata[tid] = sdata[tid+1];
}
- 6: completely Unrolled
- 对于固定大小的线程块,可以完全展开。而 GPU 线程块的大小是 2 的幂,并且<1024。
- 可以使用模板,针对不同的线程块完全展开
if(blockSize>=512){
if(tid<256){sdata[tid]+=sdata[tid+256];} __syncthreads();
}
if(blockSize>=256){
if(tid<128){sdata[tid]+=sdata[tid+128];} __syncthreads();
}
if(blockSize>=128){
if(tid<64){sdata[tid]+=sdata[tid+64];} __syncthreads();
}
if(tid<32){
if(blockSize >= 64) sdata[tid] = sdata[tid+32];
if(blockSize >= 32) sdata[tid] = sdata[tid+16];
if(blockSize >= 16) sdata[tid] = sdata[tid+8];
if(blockSize >= 8) sdata[tid] = sdata[tid+4];
if(blockSize >= 4) sdata[tid] = sdata[tid+2];
if(blockSize >= 2) sdata[tid] = sdata[tid+1];
}
GEMM¶
参考资料¶
深入浅出 GPU 优化系列:GEMM 优化(一) - 知乎 (zhihu.com)
SC'2010 Fast implementation of DGEMM on Fermi GPU¶
为了让计算单元充分利用,不让访存称为瓶颈。根据实际硬件参数,可以得到对分块大小的一个下界
- \(\#\mathrm{CUDA}\times\mathrm{freq}\times DW\times 1/2(1/b_m + 1/b_n)<BW\)
- DW 表示元素字节数,如 double float,8Byte
- 同理根据 shard memory 带宽,可以得到\(r_x, r_y\)的不等式
根据 shared memory 大小,可以得到分块大小的一个上界 \((b_m*b_k + b_n*b_k)*DW < M_{shared}\) 根据 register file 的大小,得到 rx, ry 的上界 \((r_x+r_y+r_x*r_y)*{TRHEAD\_PER\_BLOCK} < 32768\)
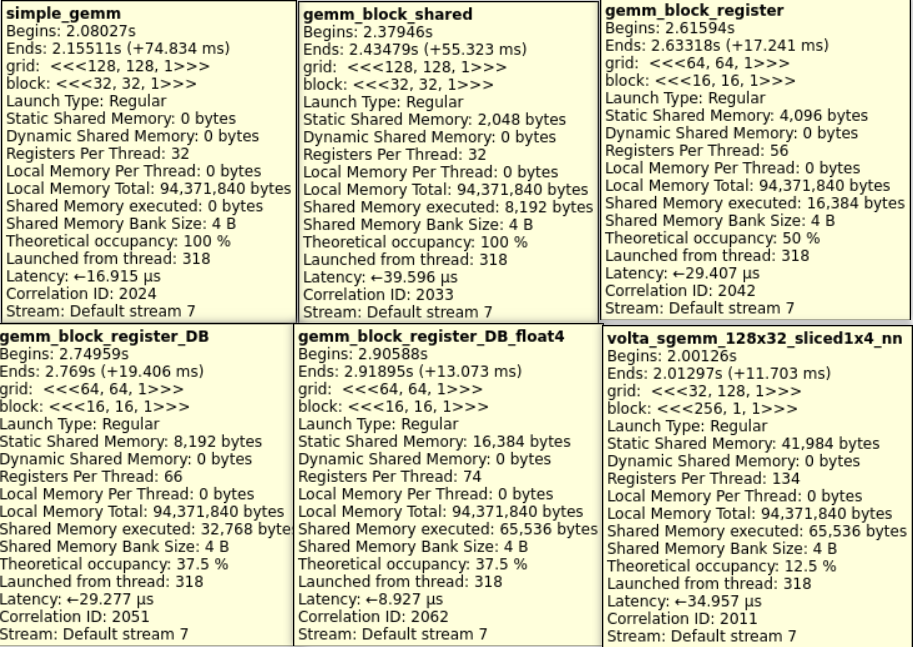
实践¶
- simple
- C 中每个元素每个对应一个线程。
- 由于一个块内线程数有上限,因此仍然需要划分块。
- C 中每个元素每个对应一个线程。
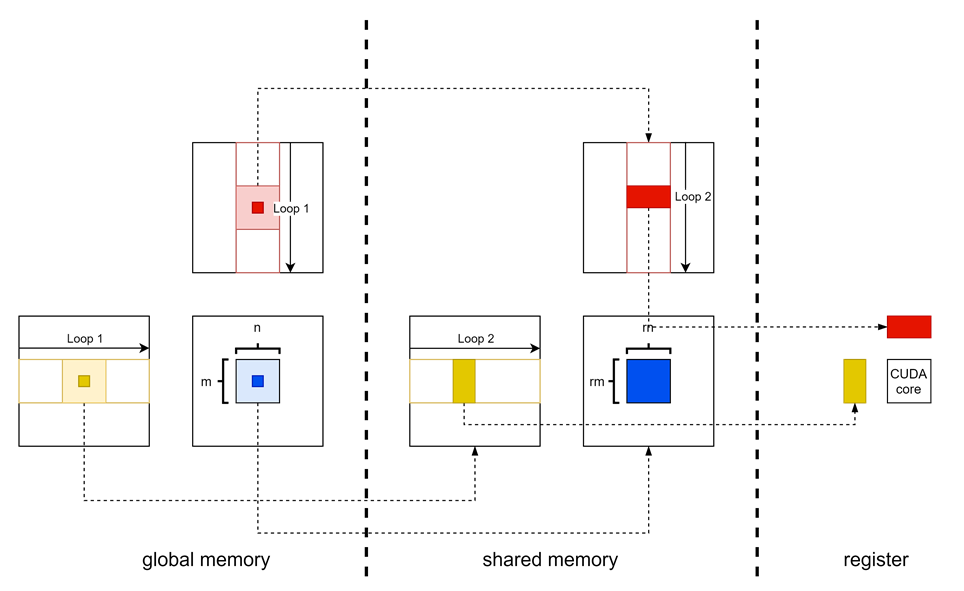
- block shared memory
- 可以发现计算 C 中相邻元素时,会利用重复的行或列。因此可以考虑将若干线程组织成一个块,共享一部分数据。刚好对应硬件的 SMEM。